
Phasing Camera System |
|---|
以前の位相測定カメラは5色チューナブル He-Ne レーザーの寿命に問題があることが発覚したため、
チューナブルダイオードレーザーを用いて再度試験を行った。



向かって左側半分の放物面鏡は横方向は手動Xステージ、前後方向は±50μm 程度駆動可能なピエゾステージに乗せ、
向かって右側半分は回転ステージと傾斜ステージに乗せた。
以下、テスト画像(中央部 32x24 ピクセルを4倍拡大したもの)
感触としては、うまくやれば1-2μmまではこの波長スキャンだけで追い込めそう。
808nm の安定化ダイオードレーザー、633nm の He-Ne レーザーとの比較では、
(781-765)/765= 2.1%
(808-765)/765= 5.6%
(633-765)/765=17.3%
それぞれ、約3倍、約9倍縞が移動するが、この順で縞の位置の違いを 1/6 位相以内に合わせていけば
完全に位相が合わせられるものと思われる。
今後は、15mm□のアパーチャ2つを15mm離して並べたときのイメージでも同じことができそうか確認する。

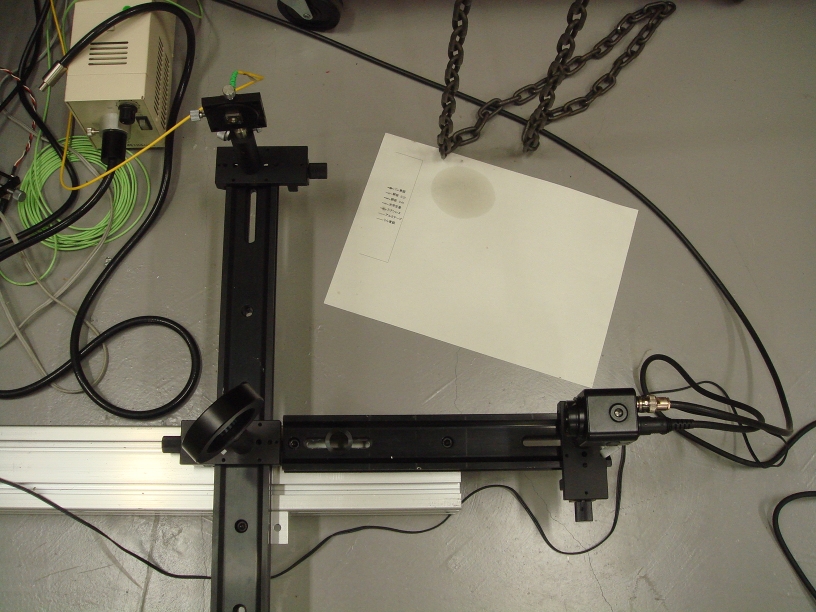
左図は、計算上のスポットの変化。2つの像が上下方向にずれている場合、重ならない部分の位相が
反転するので、像解析で評価する際には中央部をベルト状に切り出せば上下ずれがあったとしても
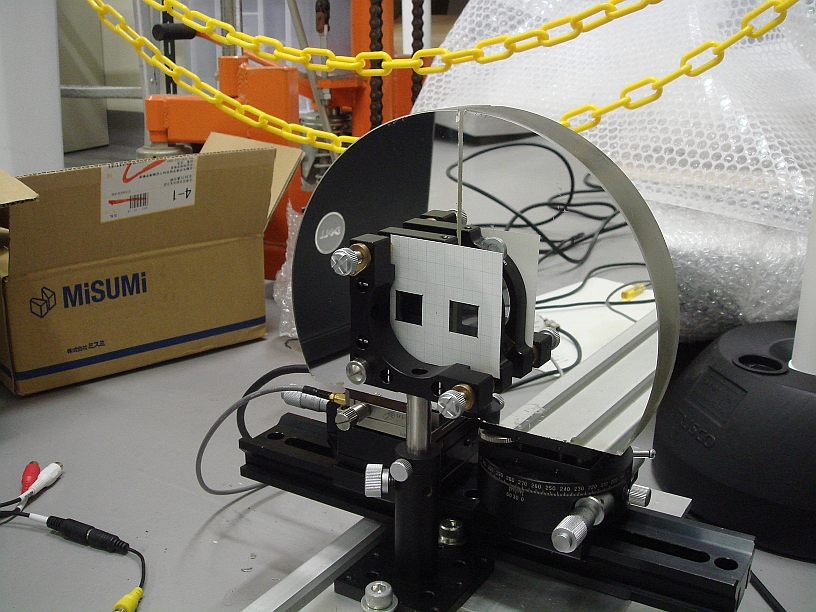
影響を受けにくいと思われる。右写真は、1.5cm□のマスクを付けた様子。
以下、テスト画像(中央部 32x24 ピクセルを4倍拡大したもの)
実際には縞と縞の間が結構光るようで、この影響を減らして評価する方法を考える必要がある。
間の部分が、ハーフミラー内での2つのアパーチャの光路差と裏面での反射によって引き
起こされている場合を考え、1.5cm□のマスクの角度を変えて比較してみた。
これらの画像を用いて、自動位相判定のアルゴリズムを考えてみる。

わかったことは、
途中、チューナブルレーザーでスキャンをしたことがはっきりと現れている。
この程度の揺らぎのある環境でも、数十フレーム分の情報のメジアンでまずまずの精度が出せそう。
633nm はスポットが小さくなるので、精度を上げるにはこの画像よりも画素スケールを小さくする必要がある。
この情報から鏡間の段差を計算すると、7.811μm
アルゴリズムは以下の通り。
段差が -0.1μm の場合(動画) | 段差が -1.0μm の場合(三角変化大きすぎ? 動画) |


カウントが飽和した場合に、光量分布の重心が正しく測定できなくなり、
これが原因で三角変化の大きさが不正確になっていることが判明したので、
カウントが飽和しないようにCCDゲインを調整した結果、三角変化が安定した。
位相が合っている状態から、約0.8μm ステップで状態を変えてスキャンした。
段差が -2.9μm の場合(動画) | 段差が -1.7μm の場合(動画) |
段差が -0.8μm の場合(動画) | 段差が 0.0μm の場合(動画) |
